懷胎15個月,25吋的長臂猴哇哇墜地了。
還是得感謝Colin先生去年8月的引言跟鼓勵。
http://s264.photobucket.com/albums/ii195/steinhsu/pickup%20arm/?action=view¤t=25inchrotating.flv
唱頭殼材料。松木超軟,容易做。
還有一塊美國櫻桃木,很硬要費力加工。有空再做一個。
松木給它染黑了,裝上釣魚桿管的第二節,有效臂長525 mm, 看起來像是台灣的草尾阿蛇(青蛇)。
9 mm 直徑的唱管,剛性不太夠。暫時擺一邊。
會用釣魚桿,是因為不知道碳纖管台北哪裡可以買到。
因之,再拿魚桿第一節15 mm粗的做一支,長度逼上了 625 mm。這是意料之外。
心臟是青銅電鍍的支撐體。


便於收納,要有個紙筒。

肚臍眼夠大,唱臂不用起落架

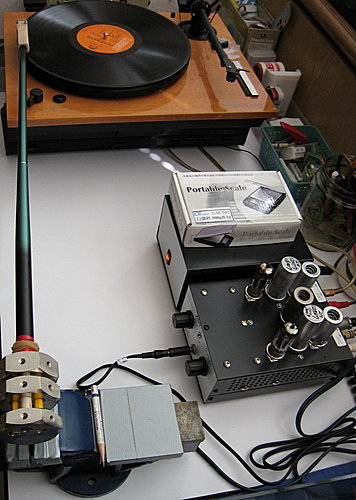
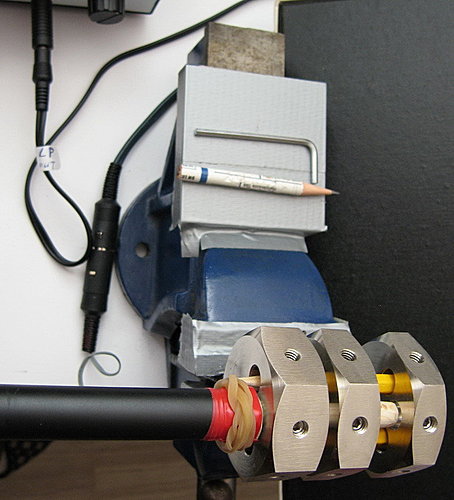
鉛筆夾緊的高度決定vertical tracking angle VTA.
移動老虎鉗決定overhang or underhang
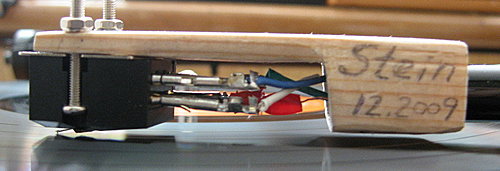
Denon DL103標準針壓2.5g可以減為2.1g

唱管左邊綁上一條1公克重的橡皮筋,微調針壓。
左邊支撐體由2B鉛筆夾在老虎鉗撐著。
主對重體緊靠支撐體。
副對重體在最右邊。
3樣6角體由唱臂貫穿,左右兩枝鉛筆貫穿,由9支內六角螺絲鎖定,構成3位一體,
不唱時可以站衛兵。
松木唱殼只是很緊,沒有黏死,可以轉動。
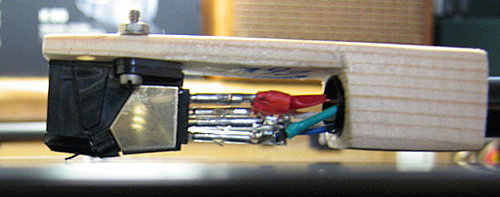
Grado 唱頭
唱殼固定孔有兩對,預定偏頭角0度(內側)跟8度,實作得到約1度跟4度。
因之最好的overhang or under hung分別是 overhung +4 mm 跟underhang -1 mm
Denon DL103唱頭要加上墊片
長臂的優點是:
優點 1:
循軌角度變化及誤差小,特別是當 Vertical Tracking Angle(VTA)比 Horizontal Tracking Angle (HTA)要求嚴格的時候。
HTA因為有唱溝兩側頂著較不嚴重,而VTA只有底下溝槽頂著,上升時沒依沒靠,只靠垂直上下的力距自力救濟。
例如250 mm長的唱臂,一個圓週長度是2*3.14*250 = 1570 mm涵蓋 360度,相當 4.36 mm = 1 度 VTA,而500 mm 唱臂可以忍受 8.7 mm = 1 度。
對於彎曲不平的波浪唱片,之前的350 mm "金雞獨立"已經證明是位"衝浪高手"過了。
至於HTA上一篇文:Tracking angle 知多少? 已經分析過了。
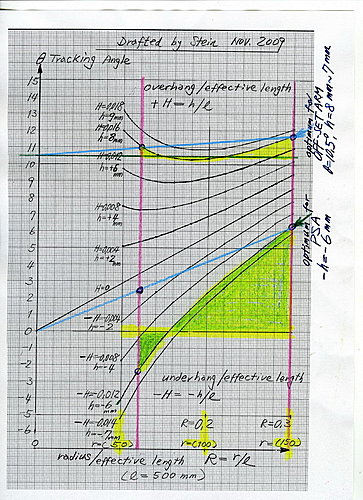
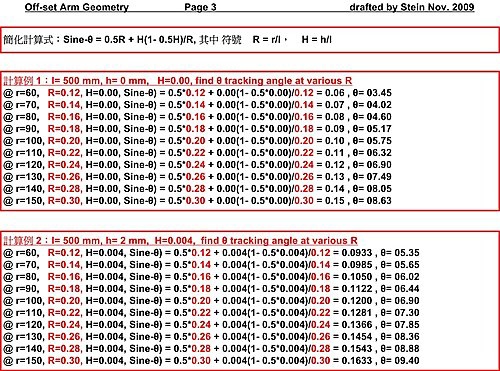
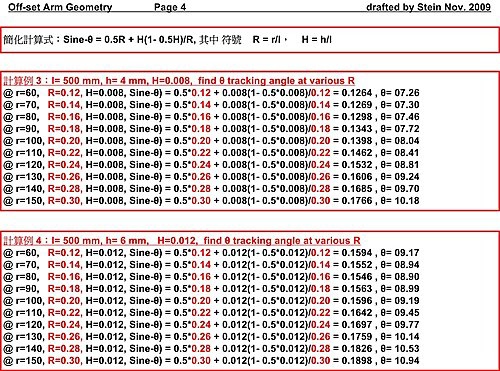
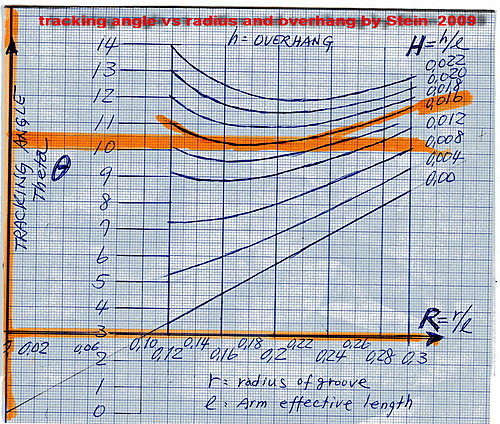
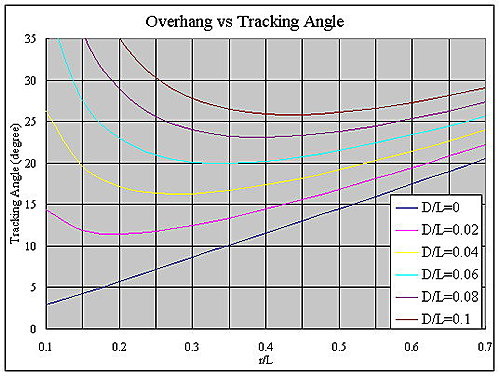
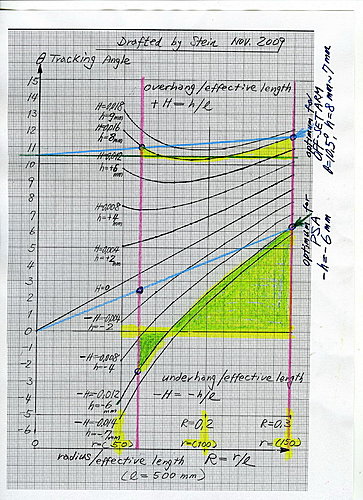
如上圖曲線,以 臂長 l=500 mm,r= 60 mm - 150 mm兩條粉紅色的界線為例。
不加偏頭角,0度theta畫一條水平線,跟 underhang H = h/l = 0.012 ( or h equal to 6 mm )交叉。
可以讀出 tracking error = - 2.5 degree @ r= 60 mm, or = + 6.2 degree@ r= 150 mm.
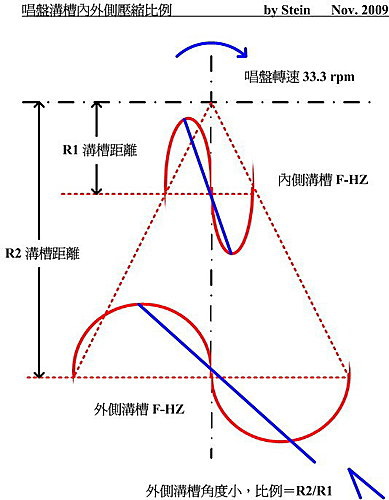
如前文說明,tracking error 的要求跟 r 成正比,外側 150 mm 比內側 60 mm寬鬆 150/60=2.5倍。
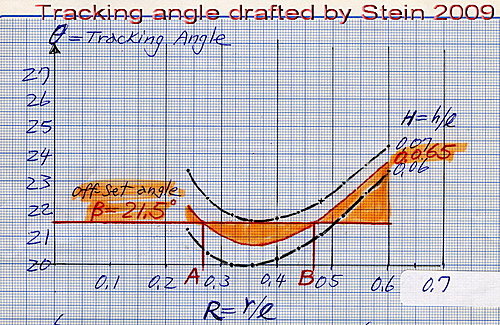
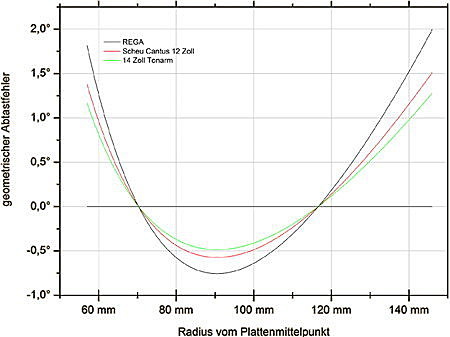
參見下圖壓縮比。
6.2 degree/2.5 degree =2.5 倍大致相合。
或者說把 r= 60 mm, -2.5 degree改畫到 +2.5 degree(distortion 無關error degree的正負),它的斜率應該跟r=150 mm一樣的,如藍色斜線表示的。這是比較適當optimum的 underhang值= - 6 mm.
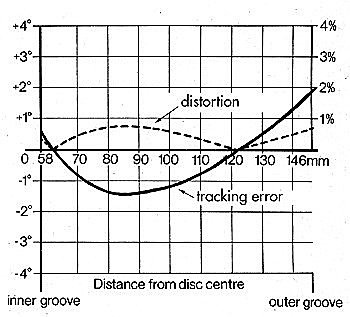
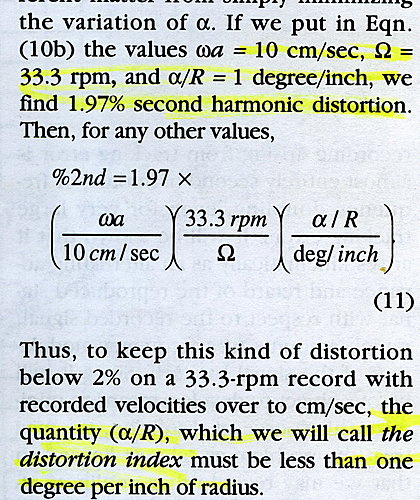
根據前文分析,tracking angle error 每 1 degree theta, 每 1 inch-r 時有 2%的second harmonic distortion。因此 2.5 degree 除於2.4 (=60 mm/25 mm) 得到約 1 degree per inch, distortion還在2 %
參見下面 Dr. Seagrave 公式 distortion index。
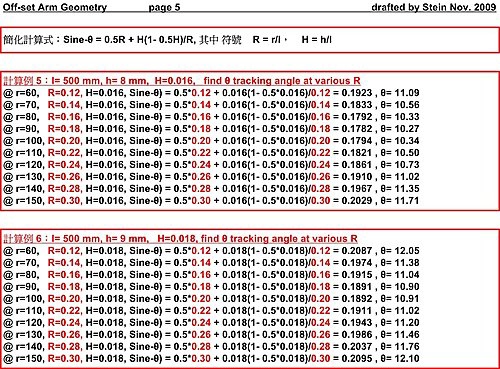
如果要加上偏頭角,同理,最適當的theta = 10.5 degree, overhang H=0.016 or h = 8 mm, 如藍色斜線,同一個斜率, distortion is 0.5 degree/2.4= 0.2%。
可見 臂長 500 mm 的tracking error, distortion已經夠好了。
625 mm 25 inch臂長更不用說了。
再長就長而無當了。
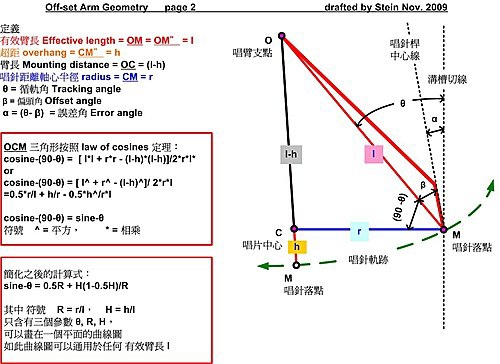
Dr. Seagrave的distortion index 公式:
優點2:
失真小、輸出大。
把唱針、桿質量看做m,震動速度看做v,唱臂質量看做M,震動速度看做V,則
mv=MV
唱頭輸出信號是v跟V的相對速度( v-V),長臂的M大則V小,因之( v-V)失真小、輸出大。
優點3:
長臂 tracking angle theta 小, 它的向內或向外的滑力 sine-theta也小很多。
例如 10吋 sine-theta 20 degree = 0.35
20吋 sine-theta 10 degree = 0.17


唱頭輸出4條訊號線拆用耳機線,唱管內部剝皮裸線,外部引線保留橡皮保護,
接連DIN公母快速接頭,方便拆離。
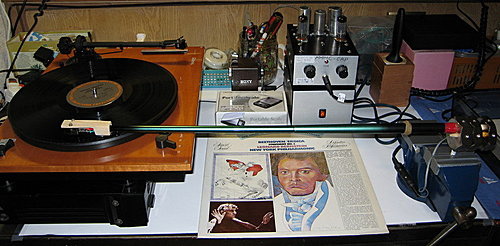

接Riaa唱頭放大器
由417A直交45直熱3極管單端功率放大,
交給Colin檜木Twins喇叭兩音路主唱。

結果如理論上預料的一致。
很滿意。
缺點是太佔桌面。
投資花費:
銅鍍6角柱 6只共 3,600.--
2.5吋老虎鉗 1,000,--
made in Taiwan電子秤 1,600,--
釣魚桿 100,--
其他 300,--